基于變結構的電機力矩平衡控制系統研究

3.2 控制系統的穩定性分析
通過Lyapunov穩定性理論對設計的控制系統進行穩定性分析。選取Lyapunov函數為:
![]()
所以整個系統Lyapunov意義下的漸進穩定。
3.3 計算控制律
由式(4)和s=ce,c>0可得控制律為:

4 仿真及實驗結果
4.1 仿真結果分析
選取BLDCM的仿真參數如下:Ra=0.83 Ω,La=3 mH,J=0.009 kg·m2,B=0.08,kT=ku=0.554;選取控制器參數值為:ε=50,k=1 800,c=1。將以上各參數代入Matlab/Simulink模塊進行數學建模仿真。圖2示出雙電機控制框圖。
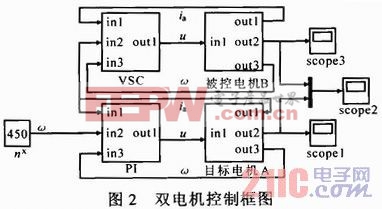
由圖可見,目標電機A采用經典雙閉環PI控制,而被控電機B與目標電機A的力矩平衡控制采用滑模變結構控制算法。通過仿真運行,得到仿真曲線如圖3所示。
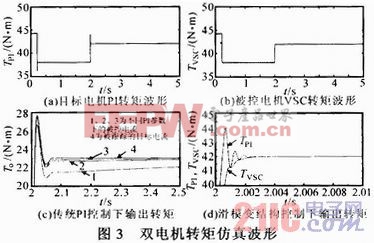
由圖3a,b可見,采用滑模變結構控制的電機B可很好地與目標電機A保持輸出轉矩一致;當突加負載時,與PI控制相比,滑模變結構控制有效地減小了電機輸出轉矩的超調;由圖3c,d可見,與PI控制相比,滑模變結構控制不但降低了超調,而且實現了無誤差跟蹤。









評論